
Page 25 - Marine Research
P. 25
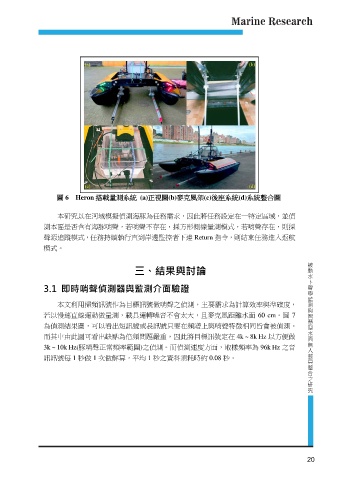
圖 6 Heron 搭載量測系統 (a)正視圖(b)麥克風架(c)後座系統(d)系統整合圖
本研究以在河域模擬偵測海豚為任務需求,因此將任務設定在一特定區域,並偵
測本區是否含有海豚哨聲,若哨聲不存在,採方形側線量測模式,若哨聲存在,則採
,
聲源追蹤模式, 任務持續執行直到岸邊監控者下達 Return 指令 則結束任務進入返航
模式。
水面無人 載具整 測與智 慧型 被動水下 聲學監 合之研 究
三、結果與討論
3. 即時哨聲偵測器與監測介面驗證
本文利用掃頻訊號作為目標訊號做哨聲之偵測,主要需求為計算效率與準確度,
若以慢速直線運動做量測,載具運轉噪音不會太大,且麥克風距離水面 60 cm。圖 7
為偵測結果圖,可以看出短訊號或長訊號只要在頻譜上與哨聲特徵相同皆會被偵測。
而其中由此圖可看出缺點為倍頻問題嚴重,因此將目標訊號定在 4k ~ 8k Hz 以方便做
3k ~ 10k Hz(豚哨聲正常頻率範圍)之偵測。而偵測速度方面,取樣頻率為 96k Hz 之音
訊訊號每 1 秒做 1 次做解算,平均 1 秒之資料須耗時約 0.08 秒。
20