
Page 24 - Marine Research
P. 24
2.1.5 智慧型無人聲學載台量測系統驗證
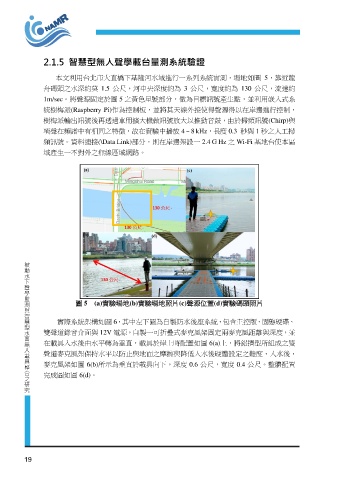
本文利用台北市大直橋下基隆河水域進行一系列系統實測,場地如圖 5,靠近龍
舟碼頭之水深約莫 1.5 公尺,河中央深度約為 3 公尺,寬度約為 130 公尺,流速約
1m/sec。將聲源固定於圖 5 之黃色星號部分,做為目標訊號產生點,並利用嵌入式系
統樹梅派(Raspberry Pi)作為控制板,並將其天線外接使得聲源得以在岸邊進行控制,
樹梅派輸出訊號後再透過車用擴大機做訊號放大以推動音鼓,由於掃頻訊號(Chirp)與
哨聲在頻譜中有相同之特徵,故在實驗中播放 4 ~ 8 kHz,長度 0.3 秒與 1 秒之人工掃
頻訊號。資料連接(\Data Link)部分,則在岸邊架設一 2.4 G Hz 之 Wi-Fi 基地台使本區
域產生一不對外之無線區域網路。
載具整 合之研 究 水面無人 聲學監 被動水下 慧型 測與智
圖 5 (a)實驗場地(b)實驗場地照片(c)聲源位置(d)實驗碼頭照片
實際系統架構如圖 6,其中左下圖為自製防水後座系統,包含主控版、固態硬碟、
雙聲道錄音介面與 12V 電源。自製一可折疊式麥克風架固定兩麥克風距離與深度,並
在載具入水後由水平轉為垂直,載具於岸上時配置如圖 6(a)上,將鋁擠型所組成之雙
聲道麥克風架保持水平以防止與地面之摩擦與降低入水後硬體設定之難度,入水後,
麥克風架如圖 6(b)所示為垂直於載具向下,深度 0.6 公尺,寬度 0.4 公尺。整體配置
完成圖如圖 6(d)。
19