
Page 27 - Marine Research
P. 27
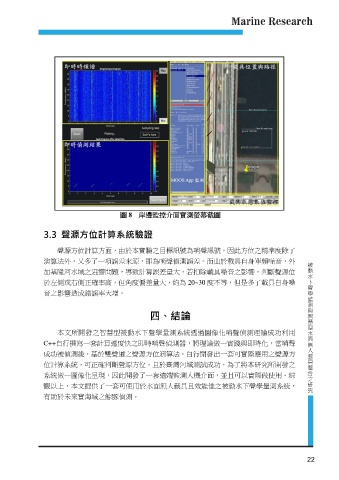
圖 8 岸邊監控介面實測螢幕截圖
3. 聲源方位計算系統驗證
聲源方位計算方面,由於本實驗之目標訊號為哨聲訊號,因此方位之精準度除了
演算法外,又多了一項誤差來源,即為哨聲偵測誤差。而由於載具自身單頻噪音,外 載具整 合之研 慧型 水面無人 被動水下 測與智 究 聲學監
加基隆河水域之混響問題,導致計算誤差量大,若扣除載具噪音之影響,判斷聲源位
於左側或右側正確率高,但角度偏差量大,約為 20~30 度不等,但是多了載具自身噪
音之影響造成錯誤率大增。
四、結論
本文所開發之智慧型被動水下聲學量測系統透過圖像化哨聲偵測理論成功利用
C++自行撰寫一套計算速度快之即時哨聲偵測器,將理論做一實踐與即時化,當哨聲
成功被偵測後,基於雙聲道之聲源方位演算法,自行開發出一套可實際應用之聲源方
位計算系統,可正確判斷聲源方位,且於臺灣河域測試成功,為了將本研究所開發之
系統做一圖像化呈現,因此開發了一套遠端監測人機介面,並且可以實際做使用。綜
觀以上,本文提供了一套可使用於水面無人載具且效能佳之被動水下聲學量測系統,
有助於未來實海域之鯨豚偵測。
22