
Page 23 - Marine Research
P. 23
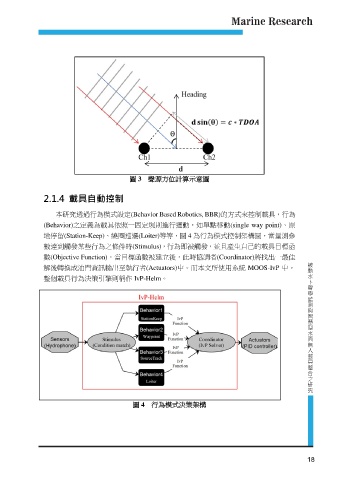
圖 3 聲源方位計算示意圖
2.1.4 載具自動控制
本研究透過行為模式設定(Behavior Based Robotics, BBR)的方式來控制載具,行為
(Behavior)之定義為載具依照一固定規則進行運動,如單點移動(single way point)、原
地停留(Station-Keep)、繞圈巡邏(Loiter)等等,圖 4 為行為模式控制架構圖,當量測參
,
數達到觸發某些行為之條件時(Stimulus) 行為即被觸發 , 並且產生自己的載具目標函
數(Objective Function),當目標函數被建立後,此時協調者(Coordinator)將找出一最佳 測與智 被動水下 聲學監 合之研 究 載具整 慧型 水面無人
解後轉換成油門資訊輸出至執行者(Actuators)中。而本文所使用系統 MOOS-IvP 中,
整個載具行為決策引擎則稱作 IvP-Helm。
圖 4 行為模式決策架構
18