
Page 22 - Marine Research
P. 22
2.1. 遠端監控系統
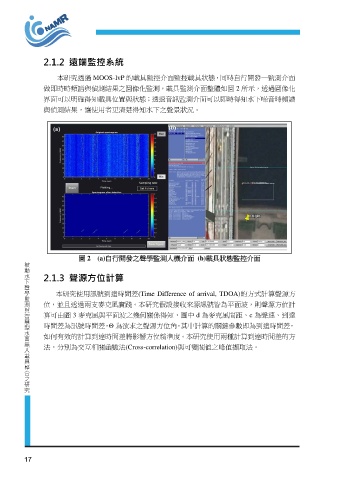
本研究透過 MOOS-IvP 的載具監控介面監控載具狀態 同時自行開發一監測介面
,
做即時時頻譜與偵測結果之圖像化監測,載具監測介面整體如圖 2 所示,透過圖像化
界面可以明確得知載具位置與狀態;透過音訊監測介面可以即時得知水下噪音時頻譜
與偵測結果,讓使用者更清楚得知水下之聲景狀況。
載具整 合之研 究 水面無人 聲學監 被動水下 慧型 測與智 圖 2 (a)自行開發之聲學監測人機介面 (b)載具狀態監控介面
2.1. 聲源方位計算
本研究使用訊號到達時間差(Time Difference of arrival, TDOA)的方式計算聲源方
位,並且透過兩支麥克風實踐。本研究假設接收來源訊號皆為平面波,則聲源方位計
算可由圖 3 麥克風與平面波之幾何關係得知,圖中 d 為麥克風間距、c 為聲速、到達
時間差為訊號時間差, Θ 為欲求之聲源方位角 其中計算的關鍵參數即為到達時間差 ,
。
如何有效的計算到達時間差將影響方位精準度。本研究使用兩種計算到達時間差的方
法,分別為交互相關函數法(Cross-correlation)與可變閥值之峰值擷取法。
17