
Page 26 - Marine Research
P. 26
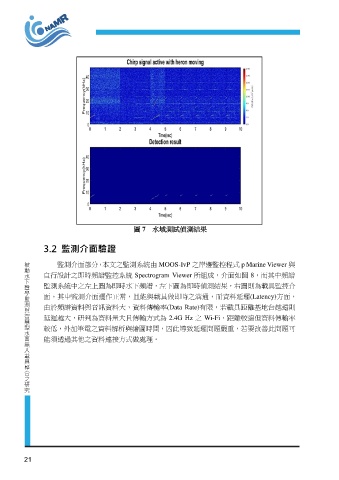
圖 7 水域測試偵測結果
3. 監測介面驗證
合之研 載具整 被動水下 究 測與智 聲學監 水面無人 慧型
監測介面部分 本文之監測系統由 MOOS-IvP 之岸邊監控程式 p Marine Viewer 與
,
自行設計之即時頻譜監控系統 Spectrogram Viewer 所組成,介面如圖 8,而其中頻譜
監測系統中之左上圖為即時水下頻譜,左下圖為即時偵測結果,右圖則為載具監控介
面。其中監測介面運作正常,且能與載具做即時之溝通,而資料延遲(Latency)方面,
由於頻譜資料與音訊資料大,資料傳輸率(Data Rate)有限,若載具距離基地台越遠則
延遲越大,研判為資料量大且傳輸方式為 2.4G Hz 之 Wi-Fi,距離較遠但資料傳輸率
較低,外加筆電之資料解析與繪圖時間,因此導致延遲問題嚴重,若要改善此問題可
能須透過其他之資料連接方式做處理。
21