
Page 21 - Marine Research
P. 21
二、研究方法
2. 被動水下聲學量測系統
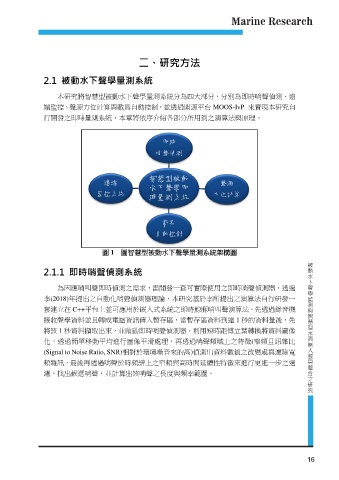
本研究將智慧型被動水下聲學量測系統分為四大部分,分別為即時哨聲偵測、遠
、
,
端監控 聲源方位計算與載具自動控制 並透過開源平台 MOOS-IvP 來實現本研究自
行開發之即時量測系統,本章將依序介紹各部分所用到之演算法與原理。
即時
哨聲偵測
智慧型被動
遠端 聲源
水下聲學即
監控系統 方位計算
時量測系統
載具
自動控制
圖 1 圖智慧型被動水下聲學量測系統架構圖
測與智 聲學監 被動水下 慧型 合之研 究 水面無人 載具整
2.1. 即時哨聲偵測系統
為因應哨叫聲即時偵測之需求,需開發一套可實際使用之即時哨聲偵測器,透過
李(2018)年提出之自動化哨聲偵測器理論,本研究基於李所提出之演算法自行研發一
套建立在 C++平台上並可應用於嵌入式系統之即時鯨豚哨叫聲演算法 。 先透過錄音機
接收聲學資料並且轉成電壓資訊傳入暫存區,當暫存區資料到達 1 秒的資料量後,先
將該 1 秒資料擷取出來,並啟動即時哨聲偵測器,利用短時距傅立葉轉換將資料圖像
化,透過簡單移動平均進行圖像平滑處理,再透過哨聲頻域上之特徵(窄頻且訊雜比
(Signal to Noise Ratio, SNR)相對於環境噪音來的高)偵測出資料數值之改變處與濾除寬
頻雜訊,最後再透過哨聲於時頻譜上之窄頻與高時間延續性特徵來進行更進一步之過
濾,找出候選哨聲,並計算出該哨聲之長度與頻率範圍。
16