
Page 81 - Marine Research volume2,issue1
P. 81
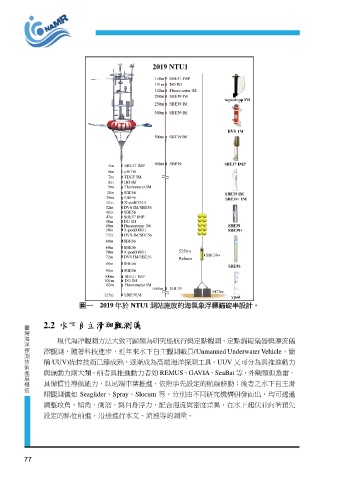
圖一 2019 年於 NTU1 測站施放的海氣象浮標錨碇串設計。
術進展 概述 臺灣海洋 探測技 2.2 水下自主滑翔觀測儀
現代海洋觀測方法大致可歸類為研究船航行與定點觀測、定點錨碇儀器與漂流儀
器觀測,隨著科技進步,近年來水下自主觀測載具(Unmanned Underwater Vehicle,簡
稱 UUV)操控技術已臻成熟,逐漸成為高端海洋探測工具。UUV 又可分為具推進動力
與無動力兩大類,前者具推進動力者如 REMUS、GAVIA、SeaBat 等,外觀類似魚雷,
具備慣性導航能力,以尾端車葉推進,依照事先設定的航線移動;後者之水下自主滑
翔觀測儀如 Seaglider、Spray、Slocum 等,分別由不同研究機構研發而出,均可透過
調整攻角、傾角、側滾、與自身浮力,配合海流與密度差異,在水下起伏並向著預先
設定的點位前進,沿途進行水文、流速等的測量。
77