
Page 3 - 風機運維之結構振動與診斷
P. 3
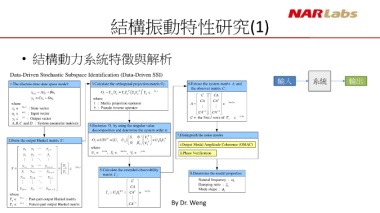
結構振動特性研究(1)
• 結構動力系統特徵與解析
Data-Driven Stochastic Subspace Identification (Data-Driven SSI)
輸入 系統 輸出
A
1.The discrete-time state space model: 3.Calculate the orthogonal projection matrix : 6.Extract the system matrix and
i
the observer matrix :
C
†
x k 1 Ax k Bu k Y Y Y Y p T Y Y T Y li j C CA
f
p p
p
i
f
p
†
y Cx Du where
k k k CA CA 2
where / : Matrix projection operator A 2n 2n
x 2n 1 : State vector † : Pseudo inverse operator
k i 2 i 1
u m 1 : Input vector CA CA
k
y l 1 : Output vector C the first rows of l i l 2n
k
A , , and : System parameter matricesB C D
4.Factorize by using the singular value
i
decomposition and determine the system order n:
S 1 0 V 1 T T 7.Distinguish the noise modes
T
2.Form the output Hankel matrix : Y USV U 1 U 2 T U S V
1 1 1
i
0 S 2 V 2 i.Output Modal Amplitude Coherence (OMAC)
y 0 y 1 y j 1 where
U li 2n , S 2n 2n , V j 2n ii.Phase Verification
y 1 y 2 y j 1 1 1
y y y Y
Y i 1 i i j 2 p 2li j
y y y Y 5.Calculate the extended observability
i i 1 i j 1 f matrix : 8.Determine the modal properties
y i 1 y i 2 y i j i
C Natural frequency : k
CA Damping ratio : k
y 2 1i y 2i y 2i j 2 1/2 2 li 2n Mode shape : k
where U S CA
1 1
i
Y li j : Past-part output Hankel matrix
p
Y li j : Future-part output Hankel matrix CA i 1 By Dr. Weng
f